Универсальный стержень )
Универсальный стержень изображен на рис. 1.1. Стержень имеет местную систему координат X1,Y1,Z1, относительно которой задается местная нагрузка и определяются усилия. Правила образования местной системы координат изложены в п.9.6.
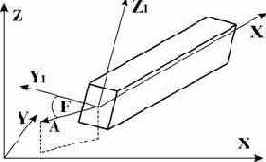
Рис. 1.1
Предусматриваются различные возможности прикрепления стержня к узлам схемы:
· при помощи абсолютно жестких вставок вдоль местных осей;
· при помощи снятия связи по любому направлению (снятие связи, соответствующей линейной степени свободы, обеспечивает проскальзывание; снятие угловой связи - свободный поворот, то есть цилиндрический шарнир).
Допускается наличие упругого основания. Может быть произведен учет сдвига.
Матрица жесткости строится для гибкой части АВ, при этом используется новая система координат, как показано на рис. 1.2.
Рис. 1.2.
Привязки сосредоточенной и трапециевидной нагрузок задаются относительно упругой части стержня, т.е. возможны отрицательные привязки.
Конечный элемент может работать во всех признаках схем, применяемых при расчете стержневых конструкций.
Конечный элемент допускает местные нагрузки, приведенные в табл.1.2
Таблица 1.2
|
Схема нагрузки, величина и привязка |
Вид нагрузки |
Тип КЭ стержня |
Допустимые направления нагрузки |
|
1 |
2 |
3 |
4 |
|
Сосредоточенная сила  Pi(тм),a(м) |
5 15 |
1 2 3 4, 5, 10 |
X, Z X, Z Z X, Y, Z |
|
Сосредоточенный момент  Мi(тм),a(м) |
5 15 |
1 2 3 5, 10 |
UY UY UX, UY UX, UY, UZ |
|
Равномерно распределенная нагрузка вдоль осей  q(т/пог.м) |
6 16 |
1 2 3 4, 5, 10 |
Z Z Z X, Y, Z |
|
Трапециевидная нагрузка  qа(т/пог.м), qb(т/пог.м), a(м), в (м) |
7 17 |
1 2 3 4, 5, 10 |
X,Z X,Z Z X, Y, Z |
|
1 |
2 |
3 |
4 |
|
Температурная нагрузка по направлению 1 —Dt (град) 5 —Dtв (град.) Dtн (град.) h(M) 6 —Dtв (град.) Dtн (град) b(м) |
8 |
1 2 3 4 5, 10 |
X X, UY UY X X, UY, UZ |
Допускается задание местной нагрузки на жестких вставках вдоль оси Х1.
На рис. 1.3 показаны положительные направления усилий. При этом усилия рассматриваются в сечении, принадлежащем концу стержня.
Рис. 1.3
